Любительский Астрономический комплекс
Любительский Астрономический комплекс.

200 мм телескоп:
Объектив телескопа
Оптическая схема объектива содержит два гиперболических зеркала и необязательный корректирующий мениск, работающий в сходящемся пучке.
Диаметр главного зеркала - 200 мм, вторичного - 65 мм. К достоинствам оптической схемы следует отнести прекрасное исправление аберраций (даже без корректирующего мениска осевые геометрические аберрации намного меньше дифракционного предела, а полевые - в несколько раз лучше, чем в классической схеме Кассегрена), а также малую асферичность зеркал (отклонение профиля от ближайшей сферы - менее 0.5 мкм). Функция мениска - дальнейшее исправление полевых аберраций и кривизны поля, а также отсечение потока воздуха, нагреваемого термоэлектрической батареей ПЗС-матрицы от основного объема трубы объектива.
Данные объектива:
| Radius | Thickness | Glass | Diameter | Conic |
| -1610 mm | -558.6 mm | Mirror | 200 mm | -1.15 |
| -762.11 mm | 541.86 mm | Mirror | 66 mm | -6.20 |
| 56.76 mm | 5.06 mm | K8 | 40 mm | |
| 52.83 mm | 151.45 mm | Air | 40 mm |
При расчете и оптимизации оптической схемы использовалась демонстрационная версия программы "Zemax" фирмы Focus Software Inc.
Расчетные геометрические пятна рассеяния
Для любителей оценивать параметры объектива по частотно-контрастной характеристике привожу и ее. Попробуйте заметить отличия от дифракционного предела!
ЧКХ
Технология
изготовления оптических деталей
объектива с некоторыми
усовершенствованиями была близка к
общепринятой. Обдирка главного зеркала
проводилась кольцевым шлифовальником,
шлифовка - пластмассовым шлифовальником
на бетонном основании, полировка и
фигуризация - полировальником из
полировочной смолы на металлической
основе. Испытания проводились теневым
методом по рассчитанным зональным
аберрациям. Испытания вторичного зеркала
проводились в сборе с главным по
автоколлимационной схеме с
использованием вспомогательного
плоского зеркала диаметром 225 мм. При
изготовлении оптических деталей
использовался самодельный шлифовально-полировальный
станок.
Объектив собран в тонкостенной
алюминиевой трубе диметром 220 мм и длиной
700 мм. Фокусировочный узел имеет привод с
шаговым двигателем

Монтировка:
Монтировка немецкого типа с идентичными электрическими приводами на полярную ось и ось склонений. Вал электродвигателя 12В/15Вт через муфту связан с червяком, который входит в безлюфтовое зацепление с червячным колесом (Z=360, m=0.5). Другой конец червяка через муфту связан с оптоэлектронным датчиком углового положения типа ДУП-1000 с ценой деления 0.36 угл. град.

Специальной электронной схемой цена деления датчика уменьшается в четыре раза. Следовательно, с учетом передаточного числа червячной передачи, угловое положение каждой оси может контролироваться с точностью 0.9 угл. сек. Микроконтроллер на основе однокристальной микроЭВМ типа КР1816ВЕ31 обрабатывает информацию от датчиков и формирует управляющие напряжения для каждого из двигателей, образуя аппаратно-программную автоматическую систему управления с замкнутой обратной связью. Для повышения точностных характеристик программно реализован пропорционально-интегрально-дифференциальный (ПИД) закон регулирования с соответствующими весовыми коэффициентами. Измеренная среднеквадратическая ошибка слежения привода в режиме компенсации суточного вращения не превышает 1.2 (дел. датчика). Подключенный к микроконтроллеру пульт управления, имеющий клавиатуру и два 8-разрядных цифровых индикатора, позволяет вводить и контролировать экваториальные координаты точки наведения, а также задавать произвольное движение в экваториальной системе координат. Естественно, что предварительно полярная ось монтировки должна быть направлена на полюс мира, а система координат привода "привязана" к экваториальной по меньшей мере по одному объекту звездного неба. Кроме того, управление микроконтроллером привода может осуществляться от персонального компьютера через последовательный интерфейс типа RS-232C. Управляющая программа микроконтроллера создавалась на персональном компьютере с использованием кросс-ассемблера собственной разработки.

ПЗС Камера:
Монохромная
телевизионная камера построена на основе
охлаждаемой ПЗС-матрицы с кадровым
переносом, электронным затвором и
вертикальным антиблюмингом типа ФПЗС-134М.
Формат матрицы - 512х288 элементов, размер
элемента - 12х16 мкм. Охлаждение матрицы
производится термоэлектрической
батареей на эффекте Пельтье и
значительно снижает темновые токи ПЗС-прибора,
позволяя увеличивать время накопления
кадра до 5 мин. (при комнатной температуре
окружающего воздуха). Поскольку ПЗС-приборы
являются интегральными приемниками
излучения, увеличение времени накопления
приводит к росту чувствительности камеры.
Камера может функционировать в двух
режимах: формирование стандартного
телевизионного сигнала при времени
накопления 18.3 мс, а также в режиме
получения кадра с программируемым
временем накопления от 0.15 мс до 5 мин.
Управление режимом работы
осуществляется микроконтроллером на
базе PIC-процессора типа 16C84 фирмы MicroChip. По
последовательному каналу RS-232C
микроконтроллер принимает от
персонального компьютера команды и
управляет такими параметрами камеры, как
время накопления, коэффициент усиления,
уровень черного и степень гамма-коррекции
видеоусилителя. Видеосигнал с выхода
камеры по коаксиальному кабелю длиной до
100 м поступает либо на вход видеомонитора,
либо на блок ввода видеосигнала в
персональный компьютер.
Блок ввода видеосигнала содержит АЦП
типа AD876 фирмы Analog Devices и буферное ОЗУ
объемом 160 Кбайт. Блок подключается к
компьютеру как два 8-разрядных внешних
устройства через разъем системной
магистрали ISA. При скорости передачи по
магистрали ISA около 300 Кбайт/сек ввод
одного кадра занимает приблизительно 0.5
сек. Использование промышленных
устройств видеоввода типа VideoBlaster не
представляется возможным из-за
нестандартного характера видеосигнала
от камеры в режиме получения кадра с
программируемым временем накопления.

Программы:
Все системное и
прикладное программное обеспечение
комплекса (за исключением управляющих
программ микроконтроллеров)
функционирует на персональном
компьютере под управлением операционной
системы Windows 95.
Системное программное обеспечение (программы
управления аппаратной частью комплекса)
создано, в основном, в среде Microsoft Visual Basic
5.0. Драйверы внешних устройств написаны
на Borland Delphi 2.0 с использованием фрагментов
ассемблера i486 в защищенном режиме и
оформлены в виде библиотек DLL.
Прикладное программное обеспечение
состоит из следующих программ:
- программы расчета эфемерид планет и Луны;
- программа расчета моментов восхода и захода светил;
- программы расчета моментов и хода солнечных и лунных затмений;
- программа расчета покрытий звезд Луной;
- программа расчета эфемерид комет и астероидов по известным элементам орбиты;
- программа расчета элементов орбиты комет и астероидов по координатам трех наблюдений;
- программа преобразования координат;
- программы ведения звездного каталога и построения звездных карт и др.
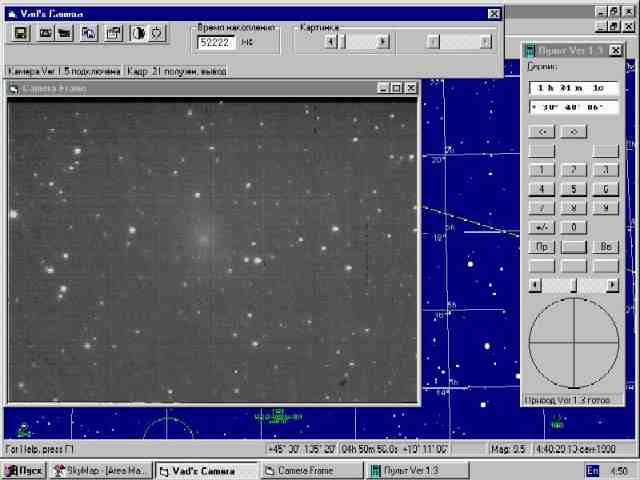
Многооконный
графический интерфейс операционной
системы Microsoft Windows 95, ее многозадачность и
использование в программах механизма OLE
Automation делают исключительно удобной и
эффективной работу с комплексом. Так,
например, "перетаскивание" мышью
координат планеты из окна программы
расчета эфемерид на окно программы
управления приводом монтировки
автоматически вызывает наведение
объектива телескопа в заданную точку.
Другой пример - кадр из окна камеры через
буфер обмена можно перенести в любую
программу, поддерживающую графические
данные для последующей обработки, вывода
на печать и т.д.
Вот, например, как выглядит рабочий стол Windows с активными программами камеры и монтировки. На заднем плане - окно SkyMap.